Reinforcement Learning Approach to Optimizing Profilometric Sensor Trajectories for Surface Inspection"
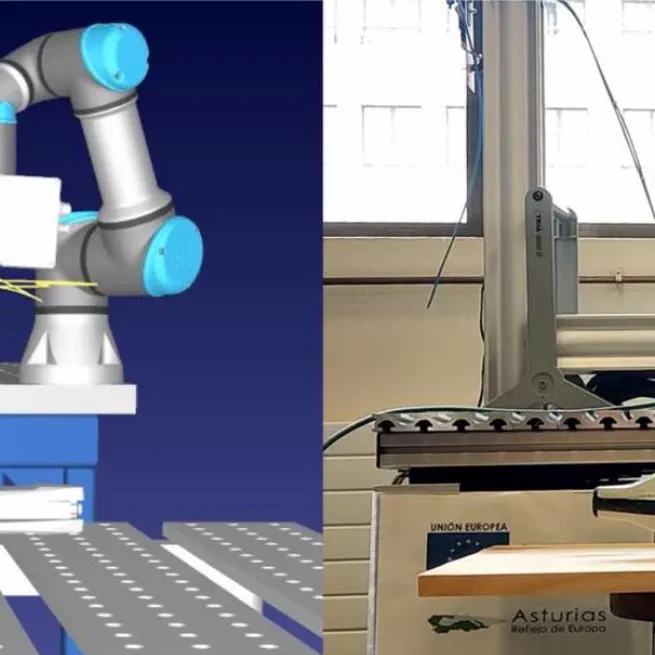
This paper presents a Reinforcement Learning-based approach to optimize robot inspection trajectories for profilometric sensors, dynamically adjusting sensor pose for precise scanning, validated through simulations and real-world experiments with a UR3e robotic arm.
Apr 3, 2025
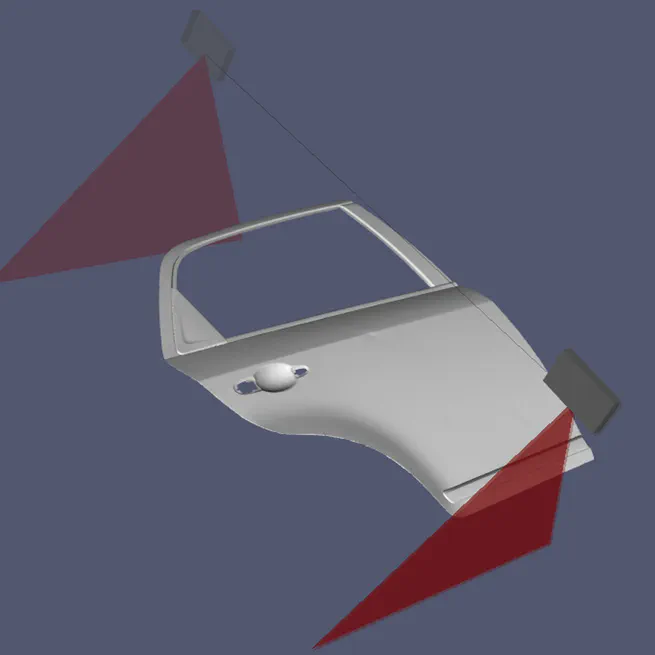
TriPlay
A simulator for laser triangulation sensors that replicates scanning and 3D surface defects.
Feb 14, 2025