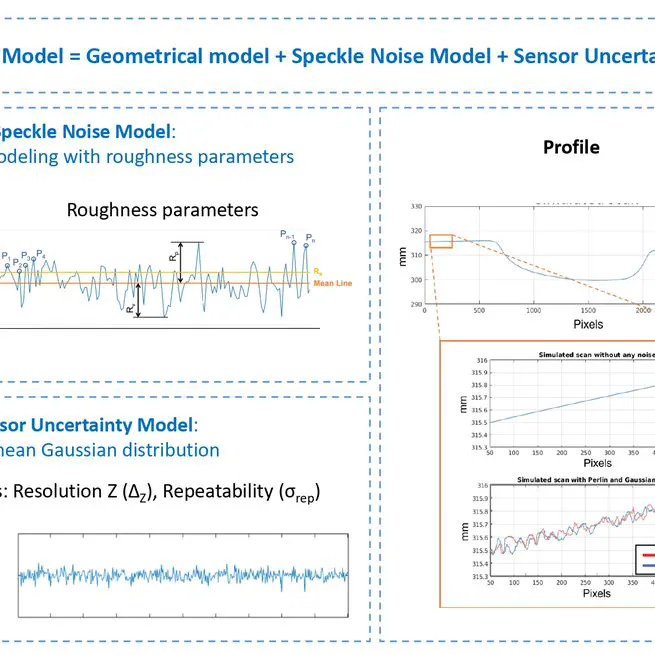
Simulation of Laser Profilometer Measurements in the Presence of Speckle Using Perlin Noise
This paper presents a simulation model for high-resolution profilometric sensor inspection, incorporating geometrical and noise modeling (Perlin and Gaussian noise) to replicate real sensor readings and validate accuracy against real scans.
Sep 2, 2023

Mobile robot localization in industrial environments using a ring of cameras and ArUco markers
This paper proposes a cost-effective localization system for mobile robots inspecting and repairing steel plates, using ArUco markers and a ring of 8 calibrated cameras to ensure accurate positioning, validated against a laser-based SLAM method.
Nov 10, 2021