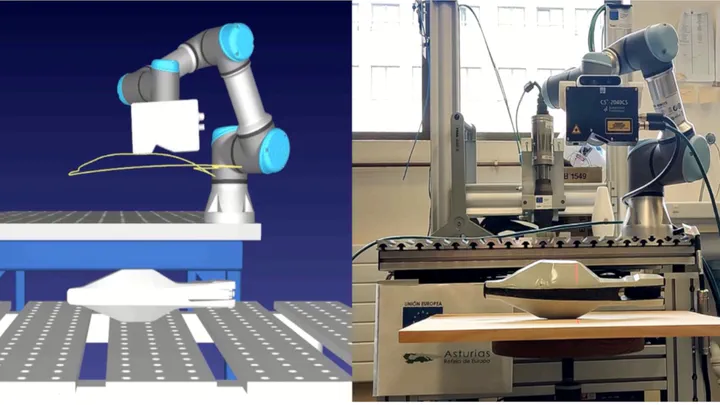
RL-based Inspection Path PlanningFeb 14, 2025 · 1 min readGo to Project SiteRL-based robotic optimization of inspection trajectories for laser profilometric sensors.Last updated on Feb 14, 2025RL for Inspection Trajectory Optimization Laser Profilometry AuthorsSara Roos-HoefgeestPhD TriPlay Feb 14, 2025 →